传统的消隙,基本是刚性或柔性的机械消隙法。机械消隙法,会增加机械结构的复杂性,而且机械消隙可靠性差。反向间隙补偿,需要先进行测量,特别是采用半闭环控制的数控机床,需要在平时注重研究造成反向间隙的因素、使用反向间隙补偿功能对机床的进给传动链进行补偿。同时,滚轴丝杠又有螺距误差,而且每个位置的反向间隙各不相同。
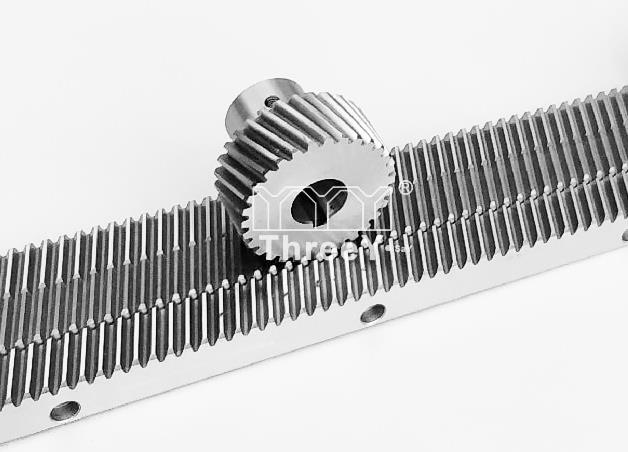
首先,齿轮的位置不要固定,要做成可调节的,比如偏心轴承座结构或长孔,微调齿轮齿条的啮合间隙,控制系统必须设置回程间隙补偿指令,调整齿轮反转后的传动间隙,根据实际的间隙值来调整伺服电机脉冲数。齿轮齿条传动的自动消息装置,脑阔机床底座和驱动梁,驱动梁沿设置于机床底座上的直线导轨滑动,在驱动梁端部设置伺服电机和与伺服电机连接的传动齿轮,传动齿轮与设置于机床底座上的齿条啮合,在驱动梁端部设置有安装板,在安装板上设置有转轴架和支架,转轴架和减速机安装架一侧通过转轴连接在一起,在减速机安装架的对侧设置有突出的耳板,一螺栓穿过耳板上的通孔与支架螺纹连接,在螺栓头部和耳板之间套装有碟形弹簧组。
当传动负载小时,可以采用双片薄齿轮错齿调整法,分别与齿条的左右两侧齿槽面贴紧,从而消除齿侧间隙。当传动负载大时,可采用双厚齿轮传动的结构。
采用双驱进给系统,即利用伺服控制达到消隙,虽然双驱系统克服了机械消隙的缺点,但高精度、高速的齿轮传动系统中,制造装配误差对传动精度的影响非常大。